
При исследовании кинематики механизмов векторные модели часто содержат контуры с двумя неизвестными по величине векторами, направленными параллельно координатным осям. На рис III.1 в качестве примера приведена кинематическая схема кривошипно-коромыслового механизма и три векторных контура, составляющих его векторную модель при решении задачи о движении центров масс s1 и s2 звеньев 1 и 2.
Рис. III.1
Параметрическая формула рассматриваемой модели (рис. III.2)
содержит два частных варианта модуля Пл2 - контуры II и III, у которых и ![]() и .
и . ![]() .
.
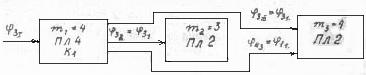
Рис. III.2
Рассмотрим основные одноаргументные модули Пл2 с функциями p1 и p2
и постоянными параметрами ![]() и .
и . ![]() .
.
![]() Уравнения (6.4)-(6.5) представим в виде
Уравнения (6.4)-(6.5) представим в виде
![]() (1)
(1)
![]() (2)
(2)
Тогда
![]()
![]()
и
![]()
![]()
![]() (см. Рис III.1, в) Из уравнений (1)-(2)
(см. Рис III.1, в) Из уравнений (1)-(2)
![]()
![]()
и

Рассмотрим основные двухаргументные модули Пл2 с функциями p1 и p2
и постоянными параметрами ![]() и .
и . ![]() .
.
![]() . Из уравнений (1)-(2)
. Из уравнений (1)-(2)
![]()
![]()
Тогда
![]()
![]()
и
![]()
![]()
![]() . Из уравнений (6.4)-(6.5) представим в виде
. Из уравнений (6.4)-(6.5) представим в виде
![]() (3)
(3)
![]() (4)
(4)
Тогда
![]()
![]()
и
![]()
![]()
![]() Из уравнений (3)-(4)
Из уравнений (3)-(4)
![]()
![]()
и


![]() (см. рис. III, г). Из уравнений (3)-(4)
(см. рис. III, г). Из уравнений (3)-(4)
![]()
![]()

