531.8: 621.01
ОПЫТ КОМПОЗИЦИИ МЕХАНИЗМОВ УПРАВЛЕНИЯ
МЕХАНИЗАЦИЕЙ КРЫЛА САМОЛЕТА
Канд.техн.наук, доцент Б.П. Семенов, инж. Б.Б. Косенок
Самарский государственный аэрокосмический университет
Механизация крыла представляет собой систему устройств (закрылков, щитков, предкрылков и др.) предназначенных для управления подъемной силой и сопротивлением самолета...[1]
Повышение требований к аэродинамическому и силовому совершенству крыла, а также переход к концепции адаптивного крыла, т. е. к управлению механизацией крыла не только на режимах взлета и посадки, но и в процессе всего полета, определяют актуальность и практическую направленность исследований по композиции механизмов.
Композиция механизма представляет собой процесс поиска принципиальной, структурной и кинематической его схемы, с требуемыми функциональными свойствами при учете различных ограничений как к механизму в целом, например габаритным и массовым, так и по кинематике и динамике его звеньев. Кинематический и динамический синтез при заданной структурной схеме, а также структурный синтез можно рассматривать как частные случаи композиции механизмов.
На начальном этапе проектирования механизма уборки-выпуска предкрылка не известна его структурная схема. При выборе принципиальной и структурной схемы анализируются прототипы, механизмы, используемые в других отраслях техники, источники патентной информации и т.д. Выбор вариантов для эскизной проработки проводится чаще всего путем субъективных качественных оценок.
Практический интерес для разработки методики композиции механизмов представляет модульное моделирование механизмов, которое является развитием метода векторного замкнутого контура, известного в нашей стране, как метод В. А. Зиновьева[2]. Среди множества векторных контуров или их систем, с определенностью между функциями и аргументами, наиболее простыми являются элементарные пространственные и плоские модули, имеющие стандартное аналитическое [3] и программное обеспечение.
Абстрактные векторные модули применительно к задачам исследования механизмов обладают следующими свойствами:
1. Кинематическая схема механизма может быть отображена одним или системой взаимосвязанных векторных модулей.
2. Одному или системе взаимосвязанных векторных модулей может быть поставлена в соответствие кинематическая схема механизма.
Первое свойство определяет возможность применения векторных модулей при анализе механизмов, а второе - при их композиции.
Модульные модели механизмов позволяют проводить сравнительный анализ кинематического и динамического совершенства различных вариантов механизмов, повышая объективность экспертных оценок предлагаемых структурных и кинематических схем.
Методика композиции механизмов на основе модульных математических модулей определяет следующую последовательность проектирования нового механизма:
1. Разработка технических требований и выбор функциональной основной задачи.
2. Переход от описательной постановки задачи к её математической формулировке (векторной модели).
3. Синтез векторных модульных моделей.
4. Переход от векторных модульных моделей к вариантам кинематических схем механизмов.
5. Моделирование и макетирование вариантов механизмов и их оценка.
Теоретически любая аналитическая функция на ограниченном отрезке изменения аргументов может быть отображена не одним, а множеством векторных замкнутых контуров. При реальном проектировании анализируется ограниченное число контурных моделей с минимально возможным числом векторов.
В рассматриваемой методике композиции существенным этапом представляется синтез векторных модульных моделей. Выделены следующие его основные этапы:
1. Создание "идеальной" векторной модели.
2. Переход от "идеальной" к вариантам параметрических векторных моделей:
2.1. Проведение анализа “передаточного вектора”
2.2. Деформация "единичных" модулей.
2.3. Использование приемов модификации структуры векторной модели.
2.4. Проведение параметрического синтеза векторной модели.
3. Сравнительный анализ вариантов векторных моделей.
“Идеальная” векторная модель является векторным образом математической формулировки функциональной основной задачи. “Идеальная векторная модель” чаще всего является лишь основой для выбора вариантов структуры векторной модели проектируемого механизма. Необходимость перехода к более сложной по структуре векторной модели определяется дополнительными ограничениями, например, габаритными.
Для перехода к вариантам создается не только “идеальная” векторная модель основной функции (выходного звена), но и “идеальная” векторная модель входного звена, а также “передаточный” вектор (контур) между двумя “идеальными” векторными модели.
Анализ “передаточного” вектора (контура) - это анализ связей между “идеальными моделями” входного и выходного звеньев. На его основе подбирается с использованием деформации "единичных" модулей наиболее подходящий вариант модели. Под деформацией “единичных” модулей здесь понимается изменение параметров стандартных модулей с векторами равной длины и сравнивается с поведением “передаточного” вектора (контура), что позволяет подобрать сочетания модулей с передаточными функциями, приближающимися к требуемой. деформация "единичных" модулей, при использовании её на ЭВМ, в определенной степени заменяет различные справочники и атласы, например, шатунных кривых.
Если необходимо расширить поле поиска требуемой структуры, то есть если деформация “единичных” модулей не дала требуемой зависимости при достаточно небольшой векторной модели, например содержащей не более 4-ых контуров, или потребовалось обойти некоторое ограничение, то тогда применяются приемы, позволяющих целенаправленно изменять структуру векторной модели, ее геометрические, кинематические, и динамические параметры в зависимости от возникшей ситуации. Создан целый набор приемов модификации структуры векторной модели, некоторые из которых будут приведены дальше на практическом примере.
Параметрический синтез позволяет окончательно оптимизировать параметры полученной векторной модели.
Сравнительный анализ кинематического совершенства вариантов проектируемого механизма проводится на этапе синтеза их модульных моделей путем оценки отклонений от требуемой передаточной функции, например методом наименьших квадратов.[4]
Отличительной особенностью предлагаемой методики является возможность перехода от формулировки основной функциональной задачи к ограниченному множеству модульных векторных моделей с последующим отображением некоторых из них кинематическими схемами. Для различных структур проводится оценка кинематического и динамического совершенства возможных вариантов и в конечном итоге выбирается как структурная, так и кинематическая схема механизма.
Практическую ценность предложенной методики синтеза векторной модели поясним на конкретном примере проектирования механизма управления предкрылком крыла летательного аппарата.
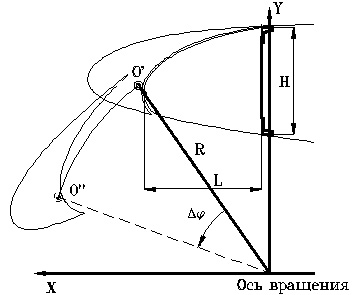
Постановка задачи: Создание механизма с одним приводом, обеспечивающим значительное перемещение предкрылка по круговой траектории, без традиционных криволинейных направляющих с ограничением по размещению механизма в пределах LxH.(см. рис.1)
Рис. 1
Была создана "идеальная" векторная модель перемещения предкрылка, а также "идеальная"" векторная модель входного звена, получена связка между двумя моделями в виде передаточного вектора 7 (рис.2), анализ поведения которого показал, что необходимо получить большее изменение линейного параметра вектора 7, чем получается при связки его с “идеальной” моделью входного звена.
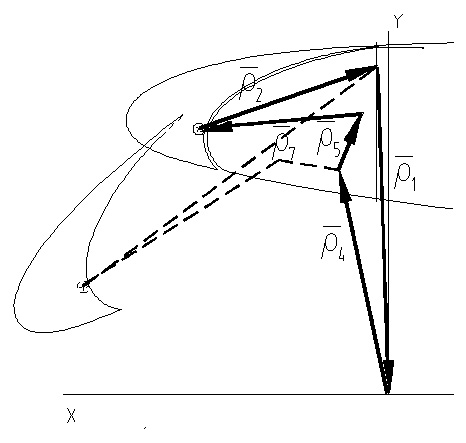
Рис. 2
Для этого было использован прием локального дублирования “идеальной” модели входного звена (созданный независимый аргумент дополнительно изменяет линейный параметр вектора "7") (рис.3).
Но так как при постановки задачи было задано условие перемещение предкрылка осуществлять одним приводом, и так как оба независимых аргумента являются угловыми параметрами векторов, то оказалось, что для удовлетворения этого требования достаточно привязать один независимый аргумент к другому (прием приведения независимых параметров к одному).
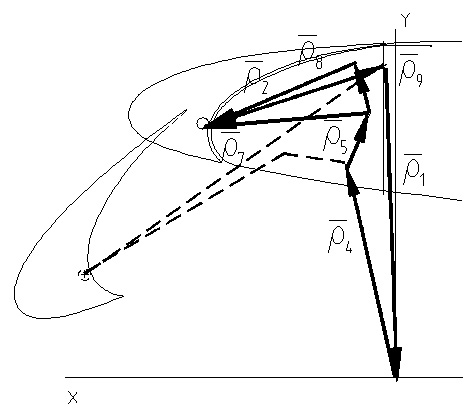
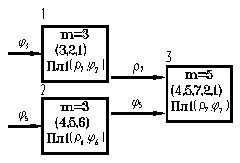
Рис. 3
Окончательный подбор параметров полученной векторной модели проводился методом случайного поиска. Одна из возможных структурных схем механизма, которая защищена авторским свидетельством, приведена на рис.4.
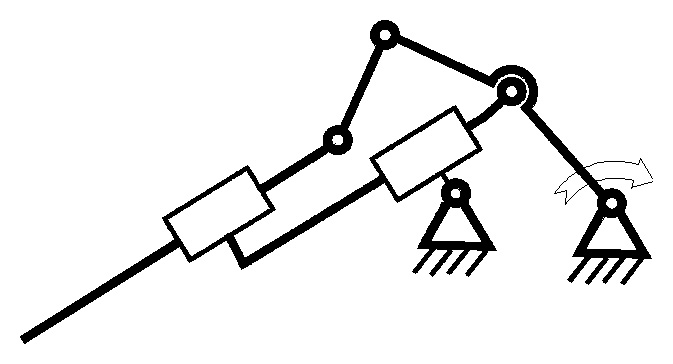
Рис. 4
Аналогичный алгоритм решения позволил получить векторные модели на основе которых были получены механизмы, также защищенные авторскими свидетельствами, и механизмы, которые еще находятся в процессе патентования.
Следует отметить, что упомянутые выше приемы структурной модификации "идеальной" векторной модели составили лишь некоторую часть набора приемов, допускающих дальнейшее развитие и систематизацию. Разработанная методика композиции механизмов на основе модульных моделей используется в Самарском конструкторском бюро АНТК им. А.Н.Туполева, а отдельные её элементы в учебном процессе на кафедре “Основы конструирования машин” Самарского государственного аэрокосмического университета.
Обозначения, принятые в работе:
ri - длина i-го вектора;
a i. bi - углы пространственного i-го вектора;
pi - длина плоского i-го вектора;
ji - угол плоского i-го вектора.
Литература
1. Житомирский Г.И. Конструкция самолетов, М.Машиностроение, 1991.
2. Зиновьев Вяч.А. Векторный метод в структурном и кинематическом исследовании механизмов. - М.: Изв.вузов /Машиностроение/, 1958, N6, с. 3-9.
3. Семенов Б.П. Аналитика элементарных плоских модулей. М.: МАИ , 1989.-40с.
4. Гупта К.С., Рос Б. Заметки о кинематической теории основанной на аппроксимации. В сб. “Теория механизмов и машин”. - М.: Наука, 1976, с166-169.
|
|